指令操作码
不同计算机架构的指令操作码不相同,但是其中涉及到的功能却大同小异。本节以 x86 平台的指令为例,说明一下指令操作码的主要分类和功能。
数据传输指令
数据传送
数据传送指令在 x86 中就是 MOV,将第二个操作数(寄存器的内容、内存中的内容或常数值)复制到第一个操作数(寄存器或内存),可以实现 寄存器、内存之间的 数据传送。
; 数据传送指令语法
mov <reg>, <reg> ; 复制寄存器值
mov <reg>, <mem> ; 从内存加载数据到寄存器
mov <mem>, <reg> ; 把寄存器值存入内存
mov <reg>, <con> ; 立即数赋值给寄存器
mov <mem>, <con> ; 立即数赋值给内存; 数据传送指令实例
mov eax, ebx ; 把 ebx 复制到 eax
mov eax, [var] ; 把变量 var 的值存入 eax
mov [var], eax ; 把 eax 的值存入变量 var
mov ecx, 100 ; 将 100 赋值给 ecx
mov byte ptr [var], 5 ; 只修改 var 指向的 1 字节栈操作
堆栈 指的是程序的运行栈,从高地址向低地址增长。PUSH 指令将 数据压入栈顶,POP 指令从栈顶取出 数据,并存入 寄存器或者 内存单元。
push <reg> ; 将寄存器值压入堆栈
push <mem> ; 将内存值压入堆栈
push <con> ; 将立即数压入堆栈
pop <reg> ; 从堆栈弹出值存入寄存器
pop <mem> ; 从堆栈弹出值存入内存push eax ; 将 eax 压入栈
push 10 ; 将 10 压入栈
pop ebx ; 弹出栈顶的值存入 ebx; PUSH 指令等同于以下指令序列
sub esp, 4 ; esp 向低地址移动
mov [esp], eax ; 把 eax 的值写入栈顶; POP 指令等同于以下指令序列
mov ebx, [esp] ; 从栈顶读取值
add esp, 4 ; esp 向高地址移动- 当执行
PUSH指令时,需要将ESP的值 减去数据大小,然后将 数据写入新地址处。 - 当执行
POP指令时,需要将栈顶的 数据(即[ESP]处的值)读取到目标 寄存器或 内存,然后将ESP的值 加上数据大小,即弹出 数据。
下图给出了一个入栈出栈指令的实例,通过 PUSH 和 POP 指令实现了 寄存器 EAX 和 EBX 内容交换:
算术和逻辑运算指令
加减
可以通过 ADD 和 SUB 两个指令实现 加减操作:
ADD指令执行 加法,将结果存入第一个操作数。SUB指令执行 减法:第一个操作数减去第二个操作数。
add <reg/mem>, <reg/mem/con> ; 加法
sub <reg/mem>, <reg/mem/con> ; 减法add eax, ebx ; eax ← eax + ebx
sub eax, 10 ; eax ← eax - 10
add [var], cl ; var ← var + cl乘除
在 x86 架构中,乘除法使用专门的指令 MUL、IMUL、DIV 和 IDIV,它们大多依赖默认 寄存器(如 EAX 和 EDX),操作前需准备好相关 寄存器的值。
; 无符号乘法
mul <reg/mem> ; EAX × 操作数 → EDX:EAX
; 有符号乘法
imul <reg/mem> ; EAX × 操作数 → EDX:EAX
imul reg, <reg/mem> ; reg ← 被乘数 × 操作数
imul reg, <reg/mem>, <imm> ; reg ← 操作数 × 常数
; 无符号除法
div <reg/mem> ; 被除数:EDX:EAX,商 → EAX,余数 → EDX
; 有符号除法
idiv <reg/mem> ; 被除数:EDX:EAX,商 → EAX,余数 → EDX; 无符号乘法
mov eax, 6
mov ebx, 4
mul ebx ; → EAX = 24, EDX = 0
; 有符号乘法
mov eax, -6
mov ebx, 4
imul ebx ; → EAX = -24, EDX = 0
imul ecx, ebx ; ecx ← ecx * ebx
imul edx, ebx, 10 ; edx ← ebx * 10
; 无符号除法
mov edx, 0 ; 高位清零
mov eax, 20
mov ecx, 3
div ecx ; → EAX = 6, EDX = 2 (20 ÷ 3)
; 有符号除法
mov eax, -20
cdq ; EDX ← EAX 的符号扩展
mov ecx, 3
idiv ecx ; → EAX = -6, EDX = -2除法指令可能会触发 异常:
- 除数等于 0:无符号或有符号除法中,如果除数是 0,会导致数学上未定义,立即触发异常。
- 结果溢出:特别常见于
IDIV有符号除法中,被除数是最小负数0x80000000,除以-1会得到0x80000000(超出32位有符号整数范围)。
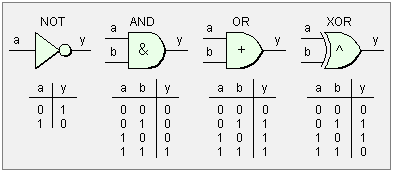
位操作
位操作用于对 寄存器或 内存中的二进制位直接进行按位运算,位操作包含如下类型:
AND:保留指定位,其它位清零;OR:将指定位设置为 1;XOR:将指定位翻转(0 ↔ 1);NOT:将所有位取反(补码的按位非);
and <reg/mem>, <reg/mem/con> ; 按位与:目标 ← 目标 & 源
or <reg/mem>, <reg/mem/con> ; 按位或:目标 ← 目标 | 源
xor <reg/mem>, <reg/mem/con> ; 按位异或:目标 ← 目标 ^ 源
not <reg/mem> ; 按位取反:目标 ← ~目标; 按位与:清除低位
and eax, 0xF0 ; eax ← eax & 0xF0,仅保留高 4 位
; 按位或:设置低位
or eax, 0x0F ; eax ← eax | 0x0F,将低 4 位全部置为 1
; 按位异或:清零技巧
xor eax, eax ; eax ← eax ^ eax,结果为 0
; 按位取反:翻转全部位
not eax ; eax ← ~eax自增自减
自增(INC)与自减(DEC)分别等价于对操作数 加 1 或 减 1,常用于循环计数或栈指针调整等场景。
INC等同于ADD 1。DEC等同于SUB 1。
inc <reg/mem> ; 加 1:目标 ← 目标 + 1
dec <reg/mem> ; 减 1:目标 ← 目标 - 1inc eax ; eax ← eax + 1
dec ebx ; ebx ← ebx - 1
inc byte [cnt] ; 将内存中 cnt 所指的字节加 1比较
CMP 指令用于 比较两个操作数的差值,不保存结果,只更新条件标志位(如 ZF、SF、CF、OF),常与条件跳转指令配合使用。
本质上,CMP A, B 等价于 SUB A, B,但不会改变 A 的值。
cmp <reg/mem>, <reg/mem/con> ; 比较:目标 - 源,仅影响标志位cmp eax, ebx ; 比较 eax 和 ebx
je equal_label ; 若 eax == ebx,跳转
cmp byte [x], 0
jl less_than_zero ; 若 [x] 为负数,跳转比较运算和加减操作一样,会影响以下 条件标志:
ZF(Zero Flag):结果是否为零SF(Sign Flag):结果是否为负CF(Carry Flag):是否产生了进位/借位(无符号溢出)OF(Overflow Flag):是否有符号溢出
这些标志用于后续的 条件跳转,如 je、jg、jl 等。
移位
移位是一种常见的位运算操作,常用于实现快速的乘法、除法、符号扩展等功能。根据处理方式不同,移位可分为 逻辑移位、算术移位和循环移位三类:
- 逻辑移位(Logical Shift):用于 无符号整数,空位统一用
0填充。 - 算术移位(Arithmetic Shift):用于 有符号整数,右移时保持符号位不变。
- 循环移位(Rotate Shift):将移出的位补回另一端,不丢失任何一位。
常见的移位指令如下表所示:
| 指令 | 含义 | 说明 |
|---|---|---|
SHL/SAL | 左移(逻辑/算术) | 功能相同,等效于乘以 2 的幂 |
SHR | 逻辑右移 | 高位补 0,用于 无符号数 |
SAR | 算术右移 | 高位补符号位(即保留符号),用于 有符号数 |
ROL | 循环左移 | 将最高位移出,补入最低位,位模式循环 |
ROR | 循环右移 | 将最低位移出,补入最高位,位模式循环 |
逻辑移位适用于 无符号整数,移位时将空出的位补为 0,不考虑操作数的符号。
- 逻辑左移 (
SHL):整体向左移动,低位补0,高位移出丢弃; - 逻辑右移 (
SHR):整体向右移动,高位补0,低位移出丢弃。
; 逻辑移位的实例
mov al, 10000000b ; 原值 -128(补码表示)
shr al, 1 ; 结果变为 01000000b,即十进制 64
尽管原数是负数,但使用 SHR 逻辑右移时,仍然将高位补 0,因此结果不再保留符号。
算术移位适用于 有符号整数,在右移时会 保留符号位(最高位),使符号不变,符合数学意义上的除法。
- 算术左移 (
SAL):整体向左移动,低位补0,高位移出丢弃; - 算术右移 (
SAR):整体向右移动,最高位保持原符号位的值。
; 算术移位的实例
mov al, -16 ; 二进制补码:11110000(0xF0)
sar al, 1 ; 结果:11111000(0xF8)→ -8
由于保留了最高位 1,右移后结果仍为负数。
循环移位(Rotate Shift)是一种将移出的位 重新从另一端补入 的移位方式,不改变位的总数,也不会丢弃任何一位,常用于加密、校验等需要 “保留所有信息” 的场景。
常见类型包括:
- 循环左移 (
ROL):将最高位移出后补入最低位; - 循环右移 (
ROR):将最低位移出后补入最高位。
; 循环右移的实例
mov al, 10000001b ; 原值:0x81
ror al, 1 ; 结果:11000000b(原最低位 1 补到了最高位)
与逻辑移位和算术移位不同,循环移位不引入新的位填充,因此所有位的内容只是位置发生变化,适用于 无符号与有符号数 的位模式操作,但不适合做乘除法运算。
控制转移指令
无条件跳转
无条件跳转到某个标签(label)。
标签是一个可识别的标识符,标签通常是一个有意义的名字,后跟一个冒号,用于标记程序中的某个位置或地址。
jmp label
跳转指令编译后通常使用 相对寻址,也就是 跳转偏移量 是相对于下一条指令的地址(即当前 PC + 指令长度) 来计算的。
对于 jmp label 指令,若 label 在距离当前指令之后 N 字节处,则相对寻址的偏移量可以通过以下公式计算:
偏移量 = 标签地址 - (当前 PC 值 + 指令长度)
条件跳转
在 CMP 指令后常常跟一个 条件跳转 指令,条件跳转指令会检查 标志寄存器(FLAGS)的标志,从而决定是否跳转到某个标签(条件成立时),如果选择不跳转的话,则继续向后执行。
| 指令 | 全称 | 跳转条件 |
|---|---|---|
JE/JZ | jump equal/zero(相等/零) | ZF=1 |
JNE/JNZ | not equal/zero(不等/非零) | ZF=0 |
JG(大于) | greater(大于) | ZF=0 且 SF=OF |
JL(小于) | less(小于) | SF≠OF |
JGE(大于等于) | greater equal(大于等于) | SF=OF |
JLE(小于等于) | less equal(小于等于) | ZF=1 或 SF≠OF |
; 比较 eax 和 ebx 的值
cmp eax, ebx
; 执行条件跳转
je equal_label
条件跳转的过程可以通过下图进行辅助理解:
子程序调用
在汇编语言中,调用一个子程序通常使用 CALL 指令,执行完子程序后使用 RET 指令返回。两者配合,实现了 从主程序跳转到子程序,再返回继续执行 的控制流程。
call subroutine
...
subroutine:
; 执行一些操作
ret
CALL 指令用于 调用子程序,涉及以下步骤:
- 保存返回地址:将当前指令的下一个地址(即返回地址)压入栈中,这样子程序返回时才知道从哪一条指令继续执行。
- 跳转到子程序:将程序计数器设置为子程序的入口地址,开始执行子程序的代码。
RET 指令用于 从子程序返回到调用函数,涉及以下步骤:
- 从栈中弹出返回地址:从栈顶弹出一个值,并将这个值作为返回地址。这是之前
CALL指令压入栈的地址。 - 跳转到返回地址:将程序计数器设置为返回地址,继续执行从调用子程序的指令的下一条指令。
子程序调用的过程可以通过下图进行辅助理解:
陷阱指令
陷阱指令(Trap Instruction)是一类特殊的 同步异常触发指令,用于从 用户态切换到内核态,以请求操作系统执行特权操作。它们本质上是一种 软件中断机制,通常用于:
- 实现 系统调用(如文件操作、进程控制等);
- 支持 断点调试(例如 IDE 或 GDB 中设置断点);
- 报告程序运行中出现的 异常情况(如除 0、非法访问)等。
陷阱的特点是由 程序主动触发,与硬件中断(如 I/O、时钟中断)区分开来。
INTINT 指令用于产生一个软件中断,它后面跟着一个中断向量号(通常是一个字节大小的立即数),用于指定要调用的中断或服务例程:
INT n ; n 为中断向量号(0~255)
执行后,CPU 根据中断向量号 n 查找 中断向量表(Interrupt Vector Table, IVT)中对应的处理程序地址,并跳转执行。常见用法如下:
mov eax, 1 ; 系统调用:exit
mov ebx, 0 ; 退出代码
int 0x80 ; 触发中断
Trap 指令和 TF 标志位的区别
陷阱指令(如 INT) ≠ TF 标志位。
INT指令显式触发陷阱,由程序执行。- TF 是 EFLAGS 寄存器中的一个位,设置为 1 后每执行一条指令就引发一次单步中断(INT 1),用于单步调试。
- 二者都能进入内核态,但触发机制不同。
Trap 指令一般通过 INT 指令执行,TF 标志位通过 PUSHF 和 POPF 修改。
协处理器指令
开关中断
CLI 和 STI 用于控制 CPU 的 中断响应能力。具体来说,这两条指令用于修改处理器的 中断标志(IF,Interrupt Flag),从而控制外部硬件中断的使能和禁止。
中断标志 (IF) 是状态寄存器中的一个标志位。如果 IF 位被设置(即为 1),处理器将响应外部硬件中断。如果 IF 位被清除(即为 0),处理器将忽略外部硬件中断请求。
CLI:清除 中断标志位(Clear Interrupt Flag),将 IF 位设置为 0,从而禁止处理器响应外部硬件中断。STI:设置 中断标志位(Set Interrupt Flag),将 IF 位设置为 1,从而允许处理器响应外部硬件中断。
cli ; 关闭中断
sti ; 开启中断
输入输出
IN 和 OUT 指令用于处理与外部设备的 输入/输出(I/O)操作。这些指令让 CPU 可以直接与硬件端口通信,从而读取或发送数据。
IN:从指定的 I/O 端口读取数据到 寄存器。通过IN指令,可以从硬件设备读取状态信息或数据。OUT: 将寄存器中的数据写入到指定的 I/O 端口。通过OUT指令,CPU 可以向设备发送控制命令或数据。
; 输入指令
in reg, port ; 从 I/O 端口 port 读取一个字节/字到 reg 寄存器
; 输出指令
out port, reg ; 将 reg 寄存器中的值写入 I/O 端口 port; 读取键盘控制器状态(端口 0x60)
in al, 0x60
; 将 AL 中的数据再次写回键盘控制器
out 0x60, al注意 I/O 端口的 编址方式 有两种:统一编址 和 独立编址,IN/OUT 指令仅适用于独立编址,对于统一编址,使用 MOV 指令即可完成输入输出。
输入输出指令(如 IN / OUT)常用于 程序查询方式 和 程序中断方式 中,由 CPU 发出指令与设备进行数据交换。相比之下,DMA 方式则由硬件控制器自动完成传输,通常不依赖此类指令。
程序查询方式 和 程序中断方式 这两种 I/O 方式的实现的核心逻辑可以参考下述代码:
// 用户态伪代码
write_to_device(data) {
while (1) {
if (kernel_read_port(STATUS_PORT) & READY_BIT) { // 轮询
kernel_write_port(DATA_PORT, data); // 实际执行 OUT
break;
}
}
}
// 内核态驱动伪代码,用一个 C 函数封装了底层输入输出汇编指令
// 通过读取端口内容,获取设备状态
uint8_t kernel_read_port(uint16_t port) {
asm("in %%dx, %%al" : "=a"(value) : "d"(port));
return value;
}
// 通过端口向设备写入
void kernel_write_port(uint16_t port, uint8_t data) {
asm("out %%al, %%dx" : : "a"(data), "d"(port));
}// 用户程序只发起请求,挂起等待中断
read_from_device(buffer) {
request_read(); // 向设备发送读取命令
}
// 内核:中断服务例程
interrupt_handler() {
uint8_t data = inb(DATA_PORT); // IN 指令读取设备数据
kernel_buffer = data;
wake_up_user();
}- 在程序查询方式中,CPU 通过反复执行 输入输出指令轮询设备状态,当设备准备就绪后再通过 输入输出指令执行读写操作。
- 在中断方式中,当设备准备好数据后会向 CPU 发送中断信号;CPU 响应后进入中断服务程序,并在其中执行 输入输出指令与设备进行数据交换。
字符串操作指令
字符串操作指令基本不考察,这里简单了解即可。
MOVS复制字符串(ES:EDI ← DS:ESI)。
movs byte ptr es:[edi], byte ptr ds:[esi] ; 复制 1 字节
movs dword ptr es:[edi], dword ptr ds:[esi] ; 复制 4 字节
从 DS:ESI 加载数据到 AL/AX/EAX。
lodsb ; 读取 1 字节
lodsd ; 读取 4 字节
将 AL/AX/EAX 存储到 ES:EDI。
stosb ; 存储 1 字节
stosd ; 存储 4 字节
比较两个字符串。
cmpsb ; 比较字节
cmpsd ; 比较 4 字节
总结
| 指令类别 | 说明 |
|---|---|
MOV | 数据传输 |
PUSH/POP | 堆栈操作 |
ADD/SUB | 加减运算 |
MUL/DIV | 乘除运算 |
AND/OR/XOR/NOT | 逻辑运算 |
CMP | 比较 |
JMP | 无条件跳转 |
Jxx | 条件跳转 |
CALL/RET | 子程序调用 |
IN/OUT | 输入/输出 |
MOVS/LODS/STOS | 字符串操作 |
INT | 触发中断 |
CLI/STI | 控制中断 |